|
|
| مقدار تولیدی: | 1 |
| قیمت: | US $3500.00 - 4900.00/ Set |
| بسته بندی استاندارد: | جعبه مقوایی/جعبه چوبی |
| دوره تحویل: | 6 تا 8 هفته |
| روش پرداخت: | T/T |
| ظرفیت تامین: | 500 مجموعه در سال |
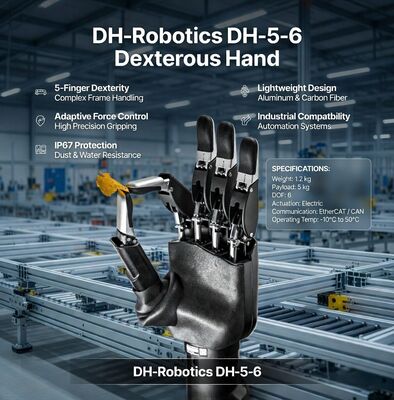
DH-Robotics DH-5-6 یک دست رباتیک چابک 5 انگشتی با 6 درجه آزادی فعال است که با مکانیزم تاندون هدایت میشود. این دست برای رباتهای انساننما، رباتهای همکار و پلتفرمهای تحقیقاتی که نیاز به گرفتن شبیه به انسان، کنترل نیرو و ادراک دارند، طراحی شده است. این دست از محرکهای خطی میکرو یکپارچه استفاده میکند و از کنترل هیبریدی موقعیت-نیرو برای دستکاری دقیق و سازگار پشتیبانی میکند.
| پارامتر | مشخصات |
|---|---|
| انگشتان | 5 انگشت (انساننما) |
| درجه آزادی فعال | 6 |
| کل مفاصل | 12 |
| سیستم محرکه | تاندونمحور با محرکهای خطی میکرو |
| حسگرها | حسگرهای نیرو / لمسی |
| حالت کنترل | کنترل هیبریدی موقعیت + نیرو |
| ارتباطات | CAN / RS485 / EtherCAT |
| وزن | تقریباً 400-550 گرم |
| نیروی گرفتن انگشت | 5-15 نیوتن در هر انگشت (معمول) |
لطفاً ارائه دهید:
|
|
| مقدار تولیدی: | 1 |
| قیمت: | US $3500.00 - 4900.00/ Set |
| بسته بندی استاندارد: | جعبه مقوایی/جعبه چوبی |
| دوره تحویل: | 6 تا 8 هفته |
| روش پرداخت: | T/T |
| ظرفیت تامین: | 500 مجموعه در سال |
DH-Robotics DH-5-6 یک دست رباتیک چابک 5 انگشتی با 6 درجه آزادی فعال است که با مکانیزم تاندون هدایت میشود. این دست برای رباتهای انساننما، رباتهای همکار و پلتفرمهای تحقیقاتی که نیاز به گرفتن شبیه به انسان، کنترل نیرو و ادراک دارند، طراحی شده است. این دست از محرکهای خطی میکرو یکپارچه استفاده میکند و از کنترل هیبریدی موقعیت-نیرو برای دستکاری دقیق و سازگار پشتیبانی میکند.
| پارامتر | مشخصات |
|---|---|
| انگشتان | 5 انگشت (انساننما) |
| درجه آزادی فعال | 6 |
| کل مفاصل | 12 |
| سیستم محرکه | تاندونمحور با محرکهای خطی میکرو |
| حسگرها | حسگرهای نیرو / لمسی |
| حالت کنترل | کنترل هیبریدی موقعیت + نیرو |
| ارتباطات | CAN / RS485 / EtherCAT |
| وزن | تقریباً 400-550 گرم |
| نیروی گرفتن انگشت | 5-15 نیوتن در هر انگشت (معمول) |
لطفاً ارائه دهید: