|
|
| مقدار تولیدی: | 1 |
| قیمت: | 1500$ |
| بسته بندی استاندارد: | 169 سانتی متر (بالا)، 75 سانتی متر (عرض) و 30 سانتی متر (طبقه) |
| دوره تحویل: | 1 ماه |
| ظرفیت تامین: | 99 واحد |
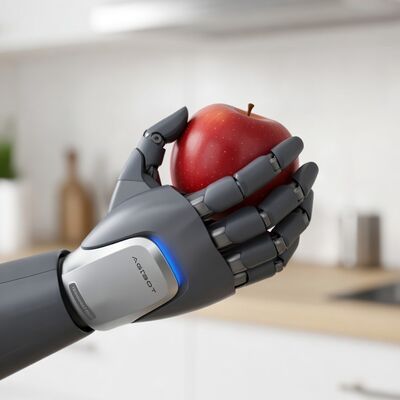
دست ربات انساننما پنج انگشتی OmniHand Pro 2025 جدید AGIBOT یک اندام انتهایی رباتیک پیشرفته است که برای تقلید از حرکت دست انسان با دقت و انعطافپذیری طراحی شده است. این دست ربات پنج انگشتی از حرکت هماهنگ انگشت، گرفتن با دقت بالا و بازخورد نیروی هوشمند برای کارهای پیچیده دستکاری پشتیبانی میکند.
OmniHand Pro 2025 برای رباتهای انساننما، رباتهای خدماتی، پلتفرمهای تحقیقاتی و بازوهای رباتیک صنعتی که به حرکت طبیعی دست، جابجایی تطبیقی اشیاء و تعامل ایمن انسان و ربات نیاز دارند، مناسب است.
هر انگشت میتواند به طور مستقل حرکت کند تا گرفتن و دستکاری طبیعی مشابه حرکت دست انسان را انجام دهد.
سنسورهای نیرو و لمسی یکپارچه، کنترل گرفتن تطبیقی را بر اساس شکل، وزن و شکنندگی شیء امکانپذیر میکنند.
کنترل روان و دقیق چندین مفصل از جابجایی ظریف و کارهای دستکاری پیچیده پشتیبانی میکند.
الگوریتمهای کنترل دیجیتال پیشرفته، حرکت پاسخگو و تنظیم در زمان واقعی را برای عملکرد پایدار امکانپذیر میکنند.
از ادغام با رباتهای انساننما، بازوهای رباتیک و رباتهای خدماتی از طریق رابطهای ارتباطی و نصب استاندارد پشتیبانی میکند.
گزینههای پیکربندی انعطافپذیر، سفارشیسازی را برای وظایف خاص یا سیستمهای رباتیک امکانپذیر میکنند.
| مورد | مشخصات |
|---|---|
| نوع محصول | دست ربات انساننما پنج انگشتی |
| درجه آزادی | انگشتان مستقل چند مفصلی |
| روش کنترل | کنترل دیجیتال هوشمند |
| حسگر | بازخورد نیرو و لمس |
| سازگاری | رباتهای انساننما و بازوهای رباتیک |
| ارتباطات | رابطهای رباتیک استاندارد |
| ادغام | نصب و کنترل مدولار |
| منبع تغذیه | سیستم خارجی تغذیه میشود |
| محیط عملیاتی | فضاهای صنعتی و تحقیقاتی داخلی |
مشخصات ممکن است بسته به پیکربندی متفاوت باشد.
AGIBOT OmniHand Pro 2025 طراحی مکانیکی شبیه انسان را با حسگر و کنترل هوشمند ترکیب میکند تا از نسل بعدی رباتهای انساننما و پلتفرمهای رباتیک پیشرفته پشتیبانی کند. این دستکاری با کارایی بالا و انعطافپذیری پیشرفته را برای برنامههای آینده ارائه میدهد.
این یک دست ربات انساننما پنج انگشتی است که برای دستکاری پیشرفته و حرکت شبیه انسان در رباتیک طراحی شده است.
بله. این از ادغام با رباتهای انساننما، بازوهای رباتیک و رباتهای خدماتی با استفاده از رابطهای استاندارد پشتیبانی میکند.
این میتواند گرفتن، جابجایی، دستکاری اشیاء و کارهای ظریفی را انجام دهد که به دقت و کنترل تطبیقی نیاز دارند.
بله. سنسورهای نیرو و لمسی یکپارچه، کنترل گرفتن تطبیقی را بر اساس بازخورد تماس امکانپذیر میکنند.
بله. این به طور گسترده در آزمایشگاههای تحقیقاتی هوش مصنوعی رباتیک و محیطهای آموزشی برای مطالعات دستکاری پیشرفته استفاده میشود.
بله. طراحی مدولار آن امکان سفارشیسازی را برای برنامههای مختلف و الزامات سیستم فراهم میکند.
|
|
| مقدار تولیدی: | 1 |
| قیمت: | 1500$ |
| بسته بندی استاندارد: | 169 سانتی متر (بالا)، 75 سانتی متر (عرض) و 30 سانتی متر (طبقه) |
| دوره تحویل: | 1 ماه |
| ظرفیت تامین: | 99 واحد |
دست ربات انساننما پنج انگشتی OmniHand Pro 2025 جدید AGIBOT یک اندام انتهایی رباتیک پیشرفته است که برای تقلید از حرکت دست انسان با دقت و انعطافپذیری طراحی شده است. این دست ربات پنج انگشتی از حرکت هماهنگ انگشت، گرفتن با دقت بالا و بازخورد نیروی هوشمند برای کارهای پیچیده دستکاری پشتیبانی میکند.
OmniHand Pro 2025 برای رباتهای انساننما، رباتهای خدماتی، پلتفرمهای تحقیقاتی و بازوهای رباتیک صنعتی که به حرکت طبیعی دست، جابجایی تطبیقی اشیاء و تعامل ایمن انسان و ربات نیاز دارند، مناسب است.
هر انگشت میتواند به طور مستقل حرکت کند تا گرفتن و دستکاری طبیعی مشابه حرکت دست انسان را انجام دهد.
سنسورهای نیرو و لمسی یکپارچه، کنترل گرفتن تطبیقی را بر اساس شکل، وزن و شکنندگی شیء امکانپذیر میکنند.
کنترل روان و دقیق چندین مفصل از جابجایی ظریف و کارهای دستکاری پیچیده پشتیبانی میکند.
الگوریتمهای کنترل دیجیتال پیشرفته، حرکت پاسخگو و تنظیم در زمان واقعی را برای عملکرد پایدار امکانپذیر میکنند.
از ادغام با رباتهای انساننما، بازوهای رباتیک و رباتهای خدماتی از طریق رابطهای ارتباطی و نصب استاندارد پشتیبانی میکند.
گزینههای پیکربندی انعطافپذیر، سفارشیسازی را برای وظایف خاص یا سیستمهای رباتیک امکانپذیر میکنند.
| مورد | مشخصات |
|---|---|
| نوع محصول | دست ربات انساننما پنج انگشتی |
| درجه آزادی | انگشتان مستقل چند مفصلی |
| روش کنترل | کنترل دیجیتال هوشمند |
| حسگر | بازخورد نیرو و لمس |
| سازگاری | رباتهای انساننما و بازوهای رباتیک |
| ارتباطات | رابطهای رباتیک استاندارد |
| ادغام | نصب و کنترل مدولار |
| منبع تغذیه | سیستم خارجی تغذیه میشود |
| محیط عملیاتی | فضاهای صنعتی و تحقیقاتی داخلی |
مشخصات ممکن است بسته به پیکربندی متفاوت باشد.
AGIBOT OmniHand Pro 2025 طراحی مکانیکی شبیه انسان را با حسگر و کنترل هوشمند ترکیب میکند تا از نسل بعدی رباتهای انساننما و پلتفرمهای رباتیک پیشرفته پشتیبانی کند. این دستکاری با کارایی بالا و انعطافپذیری پیشرفته را برای برنامههای آینده ارائه میدهد.
این یک دست ربات انساننما پنج انگشتی است که برای دستکاری پیشرفته و حرکت شبیه انسان در رباتیک طراحی شده است.
بله. این از ادغام با رباتهای انساننما، بازوهای رباتیک و رباتهای خدماتی با استفاده از رابطهای استاندارد پشتیبانی میکند.
این میتواند گرفتن، جابجایی، دستکاری اشیاء و کارهای ظریفی را انجام دهد که به دقت و کنترل تطبیقی نیاز دارند.
بله. سنسورهای نیرو و لمسی یکپارچه، کنترل گرفتن تطبیقی را بر اساس بازخورد تماس امکانپذیر میکنند.
بله. این به طور گسترده در آزمایشگاههای تحقیقاتی هوش مصنوعی رباتیک و محیطهای آموزشی برای مطالعات دستکاری پیشرفته استفاده میشود.
بله. طراحی مدولار آن امکان سفارشیسازی را برای برنامههای مختلف و الزامات سیستم فراهم میکند.